STAVE: Il progetto STAVE mira ad aumentare la sicurezza attiva dei veicoli stradali per ridurre gli incidenti mortali. Il progetto STAVE studia la stabilità globale del movimento dei veicoli stradali con un conducente umano o non umano. Lo scopo è quello di caratterizzare i tipici comportamenti non lineari del veicolo e del conducente soggetti a disturbi come manovre di sterzata evasiva, raffiche di vento, eccitazione da buca e così via. La conoscenza di tali comportamenti tipici potrebbe consentire in futuro la derivazione di leggi di controllo adeguate sia per un veicolo con conducente umano che per un veicolo senza conducente umano.
CROSS-STORM: è un progetto innovativo nato dalla collaborazione tra il Politecnico di Milano e l’Università di Genova, volto a migliorare la sicurezza stradale durante i temporali. Combina meteorologia, aerodinamica, comportamento umano e simulazioni avanzate per studiare gli effetti dei forti venti trasversali. Analizza sia la risposta dei veicoli in galleria del vento, sia quella dei conducenti tramite simulatore. Il risultato sarà una metodologia per valutare il rischio di incidenti, integrando più fattori. Il progetto punta a creare strumenti come mappe di rischio e sistemi di supporto alle decisioni per la sicurezza stradale.
JRC: L’unità Trasporti sostenibili della direzione Energia, trasporti e clima è coinvolta in attività di ricerca a sostegno dell’elaborazione, dell’attuazione e del monitoraggio della normativa relativa all’omologazione dei veicoli a livello europeo e delle Nazioni Unite. In particolare, JRC sostiene lo sviluppo della legislazione per l’omologazione di nuovi veicoli avanzati dotati di sistemi di sicurezza attiva o di capacità di guida autonoma.
Green Co-Driver: Lo scopo principale del progetto Green Co-Driver è quello di migliorare l’efficienza energetica dei veicoli stradali autonomi e connessi, in modi che possano essere accettabili dagli esseri umani. Questo obiettivo viene raggiunto integrando una funzione di guida “Green” e un agente interattivo per la guida autonoma andando a implementare un innovativo sistema interattivo di guida autonoma “Green” (Green Co-Driver), che favorisce l’efficienza energetica, rispetta le preferenze del guidatore e garantisce la sicurezza.
HL4IT: il progetto mira allo sviluppo della mobilità automatizzata in Italia. Il progetto analizza i veicoli automatizzati di Livello 4 (L4 – Automazione di Guida Elevata). HL4IT ha l’obiettivo di fornire alla comunità scientifica e agli Organismi Regolatori una caratterizzazione psicofisiologica dei conducenti che tenga in considerazione sia il veicolo L4 sia le specificità dell’ambiente di guida italiano al fine di implementare la guida automatizzata.
AI@EDGE: il progetto mira a validare virtualmente il comportamento di veicoli cooperativi connessi e automatizzati. Più in generale, il progetto si propone di sviluppare tecnologie avanzate per le reti 5G. L’attenzione si concentra su come queste reti possano essere migliorate utilizzando l’intelligenza artificiale (AI) e l’edge computing.
Progetti di ricerca non finanziati
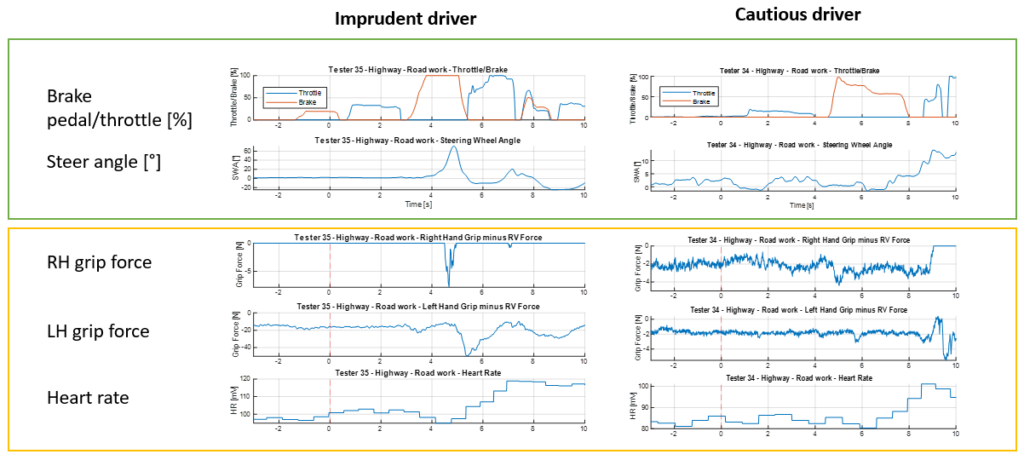
Test in autostrada
- Ricerca portata avanti in collaborazione tra Politecnico di Milano, Università Vita-Salute San Raffaele e Vi-Grade
- 30 guidatori non professionisti (volontari) caratterizzati tramite dei questionari
- Guida in autostrada per approssimativamente 10 km; lunghi periodi di guida ordinaria inframmezzati da qualche evento come lavori in corso, ingorghi di traffico…
- Monitoraggio delle reazioni fisiologiche dei guidatori (battito cardiaco, conduttività della pelle) e dei comandi di guida
- Valutazione dell’immersività e del realismo dell’esperienza tramite questionari
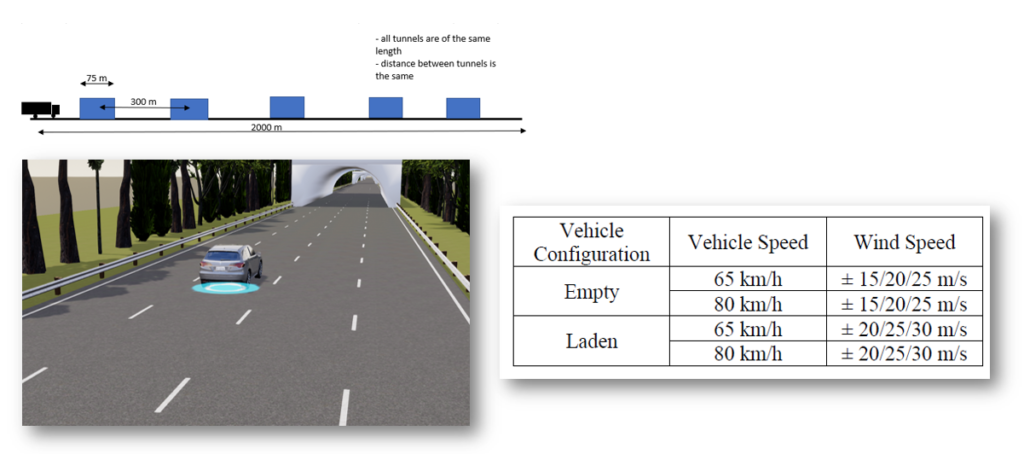
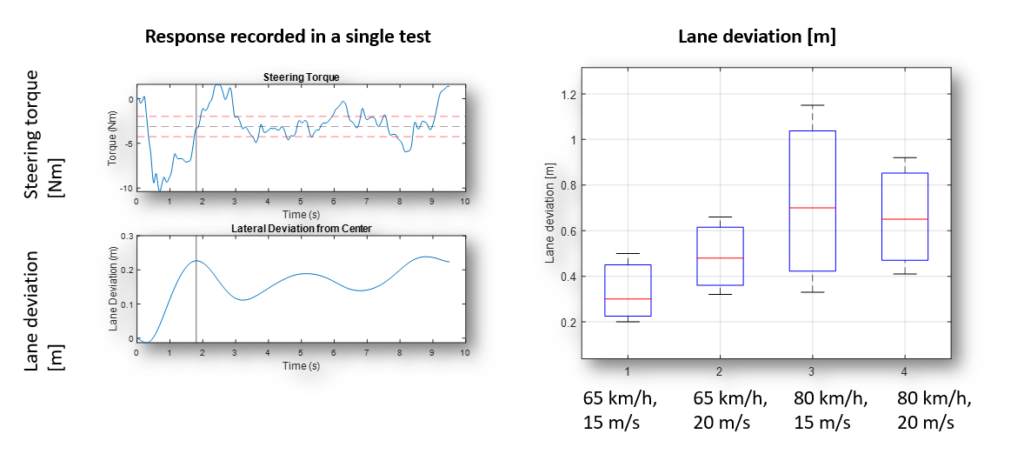
Controllo di un van colpito da vento laterale
- Analisi della risposta del guidatore al vento laterale in uscita da un tunnel
- Le forze aerodinamiche applicate sul van sono state ottenute tramite test in galleria del vento
- Analizzati dati di 28 guidatori con esperienze di guida differenti
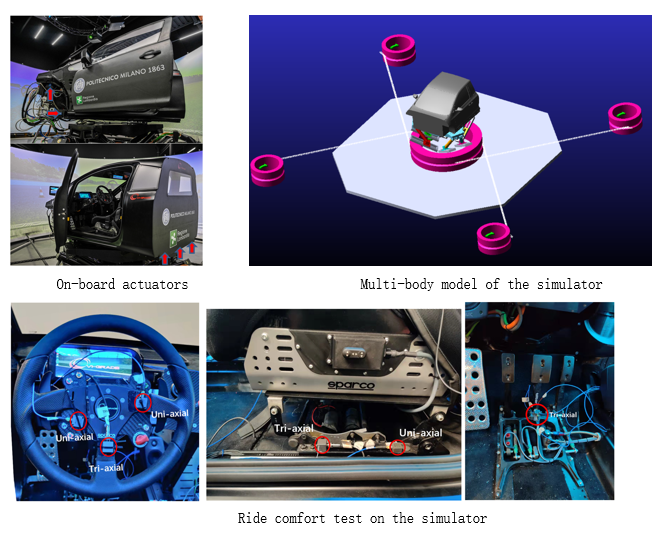
Ottimizzazione NVH
- Riproduzione accurata della risposta alle vibrazioni sul simulatore
- Il sistema Hexalift attua le vibrazioni a bassa frequenza, 8 attuatori a bordo forniscono le vibrazioni alle alte frequenze
- Ottimizzazione dei sottosistemi dei veicoli
- Condurre valutazioni soggettive/oggettive sul simulatore